
ÉLELMISZERIPARI PICK AND PLACE MECHATRONIKAI OKTATÓ RENDSZER
Fanuc SCARA robot
A rendszer kialakításához egy FANUC SR-3iA típusú SCARA robot és a hozzá tartozó R-30iB Compact Plus robot vezérlő lett felhasználva.
A SCARA robotok nagy sebességük és pontosságuk miatt ideálisak összeszerelési, Pick&Place, vizsgáló és csomagoló alkalmazásokhoz. A név Selective Compliance Articulated Robot Arm angol elnevezés kezdőbetűiből ered, amely magyarul szelektív feladatok elvégzésére kialakított artikulált (tagolt, csuklós) robotkart jelent.
A SCARA konfiguráció négy tengelyből áll, melyből az első két csukló (J1 és J2) az X-Y síkbeli mozgást teszi lehetővé, a harmadik csukló a Z tengely menti mozgást teszi lehetővé, a negyedik csukló (J4) pedig az effektor forgatására alkalmazható. A SCARA konfiguráció tehát három rotációs és egy transzlációs csuklóból áll.
A SCARA robotok munkatere jellemzően henger alakú, különféle átmérőkkel és mélységekkel. Az első és második szegmens teljes hossza a kör átmérőjét, míg a harmadik szegmens hossza a henger mélységét határozza meg.
A SCARA munkatere a legtöbb alkalmazásban előre és oldal irányban korlátozott. Ha a robot hátából kábelek és pneumatikus tömlők nyúlnak ki, akkor lehetséges, hogy a hátsó tér nem használható. Egyes SCARA robotok azonban opcionális alsó kimenetekkel kaphatók, amely lehetővé teszi a robot mögötti munkát.
FANUC SR-3iA SCARA robot:

R-30iB Compact Plus robot vezérlő:

Alkamazott SCARA robot és vezérlő adatai
FANUC SR-3iA
Típus |
SCARA |
|
Irányított csuklók |
4 csukló (J1, J2, J3, J4) |
|
Telepítés |
padló, fal |
|
Mozgási tartomány (sebesség) |
J1 |
±142° (720°/s) |
J2 |
±145° (780°/s) |
|
J3 |
200mm (1800 mm/s) |
|
J4 |
±720° (3000°/s) |
|
Maximális terhelési kapacitás |
3kg |
|
Ciklusidő |
0.33s |
|
Tömeg |
19kg |
|
Zaj |
70dB vagy kevesebb |
|
Telepítési környezet |
Környezeti hőmérséklet: 0℃-tól 45℃-ig |
|
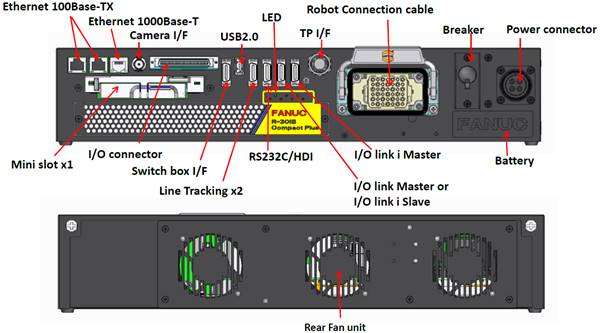
R-30iB Compact Plus
Az R-30iB vezérlő elől- és hátulnézetből, illetve a rajta található konnektorok és egy elemek:
Feszültség |
200-240VAC, 50/60Hz monofázis |
Fogyasztás |
0,25kW (SR-3iA esetén) |
Környezeti hőmérséklet |
Működési: 0℃-tól 40℃-ig |
Tömeg |
9kg |
Védelem |
IP20 |
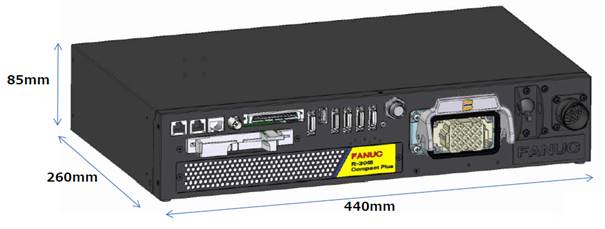
A vezérlő méretei:
Programozási lehetőségek
A FANUC SCARA SR-3iA kezelésére és programozására két lehetőség áll rendelkezésre. Ennél a típusnál a megszokott Teach Pendant-es megoldáson kívül egy új, webes interfészen keresztüli lehetőséget is kínál a FANUC. Az R-30iB Compact Plus vezérlő esetén a Teach Pendant opcionális. A webes interfész használható számítógépen vagy tableton.
A FANUC által gyártott Teach Pendant:
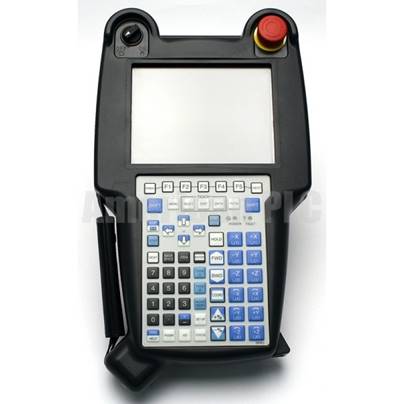
A Teach Pendant tartalmaz egy képernyőt, a mozgatáshoz és programozáshoz alkalmazható gombokat, illetve vészleállító gombot.
A Teach Pendant hátsó oldalán találhatóak az ún. Deadman Switch-ek, közül az egyik folyamatosan be kell, hogy legyen nyomva mozgatás közben. Ezek háromállású gombok, melyeknél biztonsági okokból csak a középső állás teszi aktívvá a motorokat. A gomb elengedésével gyorsan tud a felhasználó reagálni vészhelyzet esetén, a teljesen benyomott állás pedig akár valamilyen vészhelyzet hatására létrejött görcsöt is jelenthet a felhasználónál. A gomb elengedésével a robot hiba módba kerül, melyet a Reset gomb segítségével tudunk megszüntetni.
Webes interfész alapú programozás
A webes interfész a Teach Pendant helyettesítésére szolgál és tartalmazza annak összes funkcióját.
A interfész megnyitásához célszerű Internet Explorer programcsomagot alkalmazni, mivel egyéb programok esetén (Mozilla Firefox, Google Chrome, stb.) megtörténhet, hogy egyes funkciók nem jelennek meg a képernyőn.
A robotot a 192.168.1.100-as IP címen keresztül tudjuk elérni.
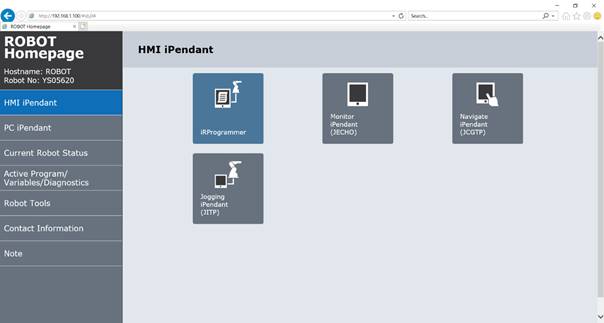
A főbb műveleteket az iRProgrammer opción keresztül tudjuk elérni.
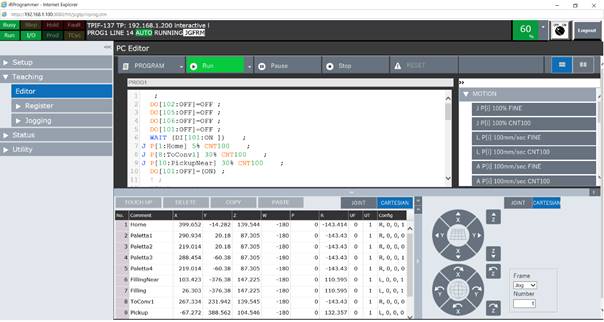
Az iRProgramer felületén keresztül tudjuk a robotot mozgatni, tudunk programot írni, az elkészített programot futtatni és megállítani, futtatás közben a sebességet változtatni, a regiszterek állását figyelemmel kísérni, stb.
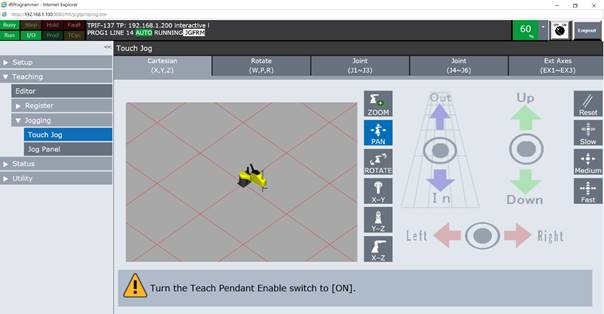
A robot mozgatása a Touch Jog és Jog Panel opciókon keresztül megjelenő oldalakon lehetséges. A Touch Jog ablakon vizualizálva van a robot és több módszer szerint tudjuk a mozgatás elvégezni. A Jog Panel-en a Teach Pendant-tel megegyező gombok jelennek meg, amelyek a mozgatásra szolgálnak.
A Touch Jog ablak:
A Jog Panel:
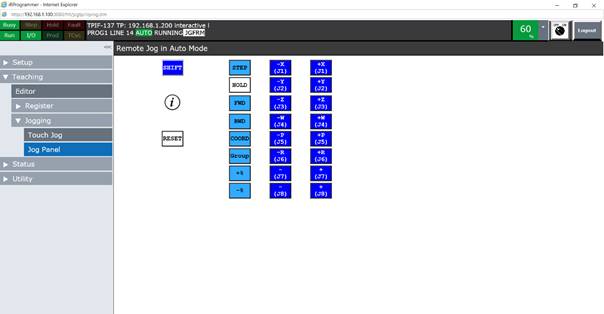
A mozgatás történhet több koordinátarendszer szerint. A JOINT koordinátarendszer csuklónkénti mozgatást tesz lehetővé. Ebben az esetben például a +J1 gomb pozitív irányban mozgatja az első csuklót, a -J1 pedig negatív irányba.
A többi koordinátarendszernél az első három sor gomb segítségével (J1-J3) az X, Y és Z mentén végzünk haladó mozgást, míg a következő három sor (J4-J6) forgó mozgást tesz lehetővé a három tengely körül. A koordinátarendszerek pozíciójukban különböznek. A világkoordinátarendszernél (WORLD) a robot alapjánál felvett koordinátarendszer szerint mozgunk, míg például TOOL koordinátarendszer esetén a szerszám alapján felvett koordinátarendszer szerint történik a mozgás.
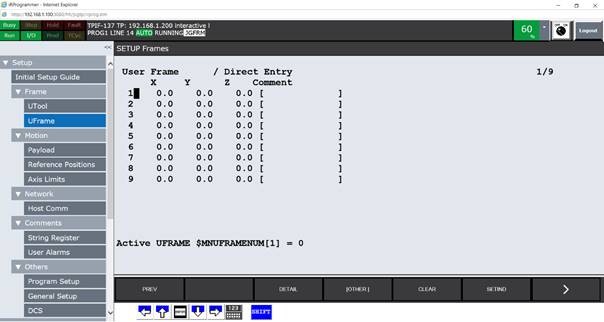
A USER koordinátarendszereket (UFrame) a felhasználó önállóan határozza meg. Ilyen koordinátarendszerekből maximum 9 definiálható. Ha nincs definiálva egy ilyen koordinátarendszer sem, akkor a robot a WORLD koordinátarendszert fogja alkalmazni.
A koordinátarendszerek között a COORD gomb megnyomásával tudunk váltani.
Az UFrame-ek definiálása a Setup/Frame/UFrame ponton keresztül megjelenő ablakon lehetséges.
A Position Register (PR) egy változókat tartalmazó memória, amelybe a pozíciók és offsetek helyezhetők.
A pozíciók megadása történhet az értékek manuális megadásával, vagy a robot adott pozíciójának mentésével. A PR-be mentéshez először a Teach Pendant-en a Data gombot kell megnyomni, majd a [Type]-nál Position Reg-et kell beállítani, és végül kiválasztani a regisztert amelybe a pozíciót szeretnénk menteni. A webes interfész esetén a következő ablakon figyelhetőek a regiszterek értékei: