ÉLELMISZERIPARI PICK AND PLACE MECHATRONIKAI OKTATÓ RENDSZER
Szenzortechnikai elemek
Szenzorok A mechatronikai rendszerekben növekvő mennyiségben használnak elektronikusan működő bináris érzékelőket.
A mozgó alkatrészek kiesésével az elektronikus érzékelők magasabb élettartamot és megbízhatóságot érnek el. Ezen kívül a kapcsolási pont sokkal precízebben és egyszerűbben beállítható.
Szenzor fogalma
A szenzorok olyan eszközök, amely valamely természeti mennyiséget, tulajdonságot, vagy feltételt a vezérlés, szabályzás, kijelzés számára könnyebben értelmezhető, használható jellé, általában feszültséggé alakítanak. A megfigyelt jel lehet fizikai, kémiai, biológiai, technológiai jellegű. A szenzorok az automatizálásban az emberi érzékszervek feladatát látják el. Az előállított jel igény szerint továbbítható, erősíthető, szűrhető, és feldolgozható.
A szenzorok általános funkcionális modelljét mutatja az ábra.
A szenzorok funkcionális modellje:
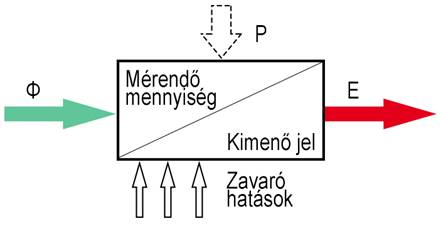
Az ábrán Φ jelöli a mérendő mennyiséget, az E jelöli a szenzor kimeneti jelét, amennyiben aktív szenzorról beszélünk, a kimeneti jel energiája a mérendő rendszerből származik, passzív esetben a szükséges energia egy külső rendszerből kerül betáplálásra, ezt jelzi a szaggatottan jelölt P teljesítmény.
Ideális szenzorok esetén a mért mennyiség, és a kapott jel kölcsönösen megfeleltethető egymásnak, azonban ez a valóságban teljes pontossággal nem biztosítható, mivel a kimeneti jelre különböző zavaró hatások is befolyással vannak.
Zavaró hatás lehet például a hőmérséklet, elektromágneses sugárzás, de akár a tápellátás ingadozása is pontatlan eredményekhez vezethet. A szenzorok pontosságát működési elvüktől, valamint kialakításuktól függően más, és más zavaró hatások befolyásolják, kiválasztásuk során fontos szempont, hogy olyan érzékelőt válasszunk, amelyre a beépítési környezetben fellépő hatások minél kisebb befolyással vannak.
Fontosabb műszaki jellemzők
A mérnöki gyakorlatban a szenzorok kiválasztásának elsődleges szempontjai az érzékelők műszaki paraméterei, ezek értelmezése a hatékony munka alapfeltétele. Egy adott érzékelő-választási döntés meghozásakor lehetetlen lenne a választási lehetőségeket az összes műszaki paraméter szerint összehasonlítani, ezért általában a döntéshozásban csak a legfontosabbak játszanak szerepet. Ennek kijelölése a tervezőmérnök feladata.
Átviteli karakterisztika
A szenzorok karakterisztikája alatt azt a meghatározott kapcsolatot, függvényt értjük, amely a bemenő mennyiség függvényében adja meg a kimeneti jel értékét, elhanyagolva a tranziens jelenségeket. A 3. ábra néhány karakterisztika típust mutat be.
A szenzorok különböző jelátviteli görbéi, a.) ideális lineáris, b.) valós, adott szakaszon lineáris, c.) komparátor, d.) hiszterézises komparátor, e.) ablakkomparátor, f.) lépcsős karakterisztika.
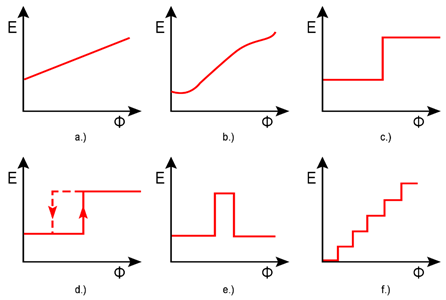
Az ideális karakterisztikáról megoszlanak a vélemények, a legtöbb forrás a lineáris függvénykapcsolatot tartja ideálisnak, azonban léteznek olyan esetek, amikor szükség lehet pl. négyzetes, vagy logaritmikus kapcsolatra is. (a logaritmikus karakterisztikát az emberi érzékelés logaritmikus jellege indokolja)
Ezen ideális függvénykapcsolatok a valóságban nem megvalósíthatók a különböző zavaró hatásokból adódóan. A tervező feladata, hogy olyan érzékelőt válasszon, amely a kívánt karakterisztikát a legkisebb hibával közelíti, vagy adott érzékelőt olyan tartományon üzemeltesse, amely megfelelően közelíti a karakterisztikát. Szintén fontos különbség, hogy a valóságos karakterisztikák általában felülről, és alulról is korlátosak, mivel a valós fizikai eszköz által kezelhető tartomány is véges.
Az átviteli karakterisztikák mérések segítségével határozhatók meg. A mérési eredményeket a könnyebb használhatóság érdekében feldolgozzák, majd matematikai függvényekkel írják le. Léteznek a klasszikus folyamatos függvényekkel közelíthető jelleggörbék, de akadnak olyan szakadással rendelkező karakterisztikák is, amelyek csak a modern matematikai eszközökkel írhatók le.
Érzékenység
A szenzorok érzékenysége alatt egy arányszámot értünk, meghatározásakor a kimeneti jel változását hasonlítjuk a bemeneti jel egységnyi változásához. Ez az érték egy adott karakterisztika pontban, a pontbéli érintő. Ebből adódóan kimondható, hogy a szenzorok érzékenysége is a mérési tartomány függvénye.
Mérési tartomány
Az érzékelők működését rengeteg tényező befolyásolhatja, így az általuk mért mennyiségek különböző környezeti feltételek mellett különböző értékekre adódnak.
Teljesen pontos eredményeket sosem leszünk képesek elérni, azonban mindig törekedni kell a fellépő hibák mértékének korlátozására. Ennek érdekében a katalógusok minden szenzor esetén megadják azt a szenzorra jellemző környezeti tartományt, amelyben a karakterisztika jó közelítéssel a megadott görbe alapján alakul. Ilyen adatok lehetnek, pl. a környezeti hőmérséklet, nyomás, páratartalom stb.
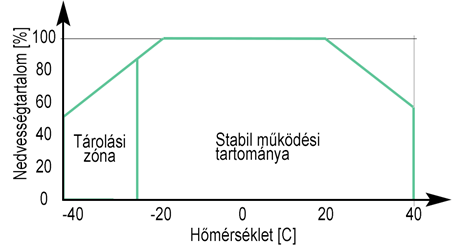
Sok érzékelő esetén beszélhetünk alulterhelési tartományról, ebben az intervallumban a mért mennyiség olyan kis értékeket vesz fel, amivel összemérhető a szenzor pontatlansága, emiatt a szenzor ebben a tartományban való működtetése nem ajánlott. Beszélhetünk még túlterhelési tartományról is, itt a mérendő mennyiség olyan nagy, amely már elérheti a szenzor telítődési határát, szélsőségesen nagy érték esetén akár kárt tehet a mérőelemben, emiatt a fellépő pontatlan mérési eredmények mellett, a mérőberendezés veszélyeztetése is indokolja a tartomány elkerülését.
Egy hőmérséklet, és páratartalom mérő szenzor mérési tartománya, külön feltüntetve a tartományt, ahol már a pontos működés nem garantált, viszont biztonságos tárolásra alkalmas:
Pontosság, karakterisztika hibák
A szenzorok a katalógusban meghatározott működésükhöz képest eltérő mérési értékeket szolgáltatnak, ezeket a pontatlanságokat az alábbi jelentősebb kategóriákba sorolhatjuk.
Hiszterézis hiba: amikor a szenzor egy adott értéket felülről csökkenve közelítő, valamint alulról növekedve közelítő bemeneti értékre eltérő kimeneti értéket ad.
Ismétlési hiba: amikor egy érzékelő ugyanazt a bemeneti értéket, ugyanabból az irányból elérve eltérő kimeneti értéket produkál.
Alakhiba: amikor a szenzor karakterisztikája stabilan eltér a katalógusban megadott értéktől.
Kúszáshiba: erről a hibatípusról akkor beszélhetünk, amikor egy adott bemeneti értékre kiadott kimeneti jel az idő előrehaladtával változik. Ekkor fontos adat a kúszási jelenségre jellemző hosszú távú nullpont eltolódás, mellyel a pontatlanság, akár programozottan korrigálható.
Környezeti hatások
Nem elhanyagolható, hogy a környezet különböző paramétereinek változása is komoly hatással lehet az érzékelő által kibocsájtott jellel, ezért az érzékelő választás során külön figyelmet kell fordítani, hogy a kiválasztott szenzort környezetben jelenlévő jelentősen ingadozó állapotjelzők ne befolyásolják, amennyiben mégis ilyen szenzor kerül kiválasztásra biztosítani kell a jel szűrését, a hiba korrigálását.
Egy lineáris karakterisztika legjellemzőbb hibái:
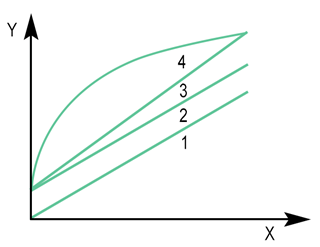
A fenti ábrán látható, hogy egy tetszőleges ideálisan mérhető mennyiségre mekkora mértékű, és milyen jellegű hibák tevődnek.
Az 1-es mező az ideális hibamentes esetben mérhető érték, ezt a valóságban lehetetlen elérni, ezt az esetet maximum közelíteni tudjuk.
A 2-es mező a nullpont eltolódási hiba, ennek értéke nem függvénye az érzékelő bemenetének, a teljes mérési tartományon állandó értékű, korrigálása ebből adódóan egyszerű.
A 3-as mező jelképezi az érzékenységi hibát, amely a bemenő jel függvényében változik, korrigálása az érzékenység ismeretében szintén könnyen elvégezhető.
A 4-es mező a jelleggörbe hiba, ennek korrigálása a legnehezebb feladat, mivel a katalógusok által megadott elméleti karakterisztika is csupán egy közelítő érték.
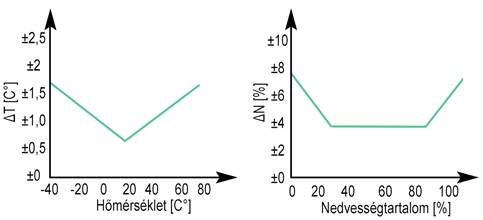
Tűréstartomány
A mérnöki alkalmazásban általában a szenzorok hibáját nem tényezőnként, hanem összesített értékben vesszük figyelembe, ezt nevezzük a szenzorok tűréstartományának. Ezt vagy táblázatos formában bocsájtják a tervező rendelkezésére, vagy grafikonos formában.
Mindkét esetben leolvasható, hogy különböző környezeti feltételek esetén mekkora az érzékelő összesített hibája. Az alábbi egy ilyen grafikonos formában megadott érzékelő-tűrésmezőt mutat.
A tűréstartomány pontos ismerete elősegíti a géptervezőt, hogy egy mérési adat mennyire megbízható, milyen mértékben tükrözi a valóságot. Ez a jellemző kiemelkedő fontosságú a pontos automatizmusok megvalósításában.
Egy multiszenzor tűréstartományai:
Mágnessel kapcsolt pneumatikus közelítéskapcsoló
Pneumatikus „reed kapcsoló”:
A pneumatikus közelítéskapcsoló egy 3/2-utú szelepet tartalmaz, amelyet a mágneses tér közelítése vált át. Működtetésekor a pneumatikus közelítéskapcsoló pneumatikus jelet ad ki. A közelítéskapcsoló olyan berendezésekben alkalmazható, ahol közvetlenül a pneumatikus kimenő jel feldolgozására van szükség. Egy állandó mágnes pneumatikus útszelepet kapcsol, az érzékelő alacsony nyomású pneumatikus jelet ad. Munkahengerre szerelve az érzékelők között legalább 50 mm távolság legyen.
Induktív közelítéskapcsolók
Az érzékelő egy nagyfrekvenciás rezgőköri oszcillátort tartalmaz, melyre tápfeszültséget kapcsolva váltakozó mágneses tér alakul ki. A rezgőkör tekercsét mágnesesen szigetelő burkolatba helyezik, mely az érzékelő aktív felületének irányából nyitott, ezzel meghatározott irányba kiengedve a mágneses erővonalakat.
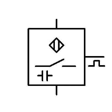
Induktív érzékelő és általános jelképe:

Ebbe a mágneses térbe fémtestet helyezve az oszcillátor rezgése csillapodik, és egy előre meghatározott megszólalási szintnél, a triggerfokozat átkapcsol, melynek hatására megváltozik a kimeneti kapcsolási állapot is.
Az induktív közelítés kapcsolóval jól fel lehet ismerni minden villamos vezetőből készült alkatrészt, a fémek mellett a grafitot is.
Az induktív érzékelő műszaki jellemzői:
működtető feszültség |
10 ... 30 V |
maximális áramerősség |
75 ... 400 mA |
kapcsolási távolság |
0,8 ... 10 mm |
kapcsolási frekvencia |
10 ... 5000 Hz |
Az induktív érzékelő energia-felvétele néhány mikrowatt. Ez az alábbi előnyökkel jár:
- Nincs mágnesező hatása az érzékelendő fémtárgyra
- Nem okoz rádióvételi zavarokat
- Nem melegszik az érzékelendő fémtárgy
Redukciós tényező táblázat:
St 37 acél |
1 |
vörösréz |
0,25 ... 0,4 |
sárgaréz |
0,35 ... 0,5 |
alumínium |
0,35 ... 0,5 |
króm-nikkel tv. |
0,7 ... 0,9 |
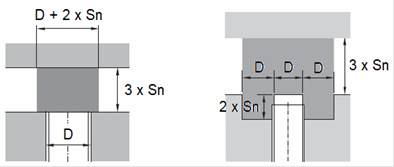
A kapcsolási távolság függ a fémtárgy anyagának elektromos vezetőképességétől, mivel a kisebb ellenállás kisebb örvényáram-veszteséget okoz. A névleges kapcsolási távolságot egy szabványos, 1mm vastag St37-es acéllemez próbatesttel határozzák meg. A lemez négyzet alakú, oldalhosszúsága vagy az érzékelő aktív felületének átmérőjével, vagy a névleges kapcsolási távolság háromszorosával egyenlő.
A két érték közül a nagyobbat kell figyelembe venni a próbatest méretének megválasztása során. Az acéltól eltérő anyagoknál úgynevezett redukciós tényezőt alkalmazunk.
A redukciós tényező megmutatja, hogy az adott fémes vezetőhöz tartozó kapcsolási távolság hogyan viszonyul az acélnál mérhető kapcsolási távolsághoz.
A kapcsolási távolságra hatással van a tekercs átmérője (nagyobb átmérőjű tekercs esetén nagyobb a kapcsolási távolság), valamint a szkínhatás. Annál erőteljesebben érvényesül minél nagyobb a frekvencia, vagy az anyag mágneses permeabilitása illetve elektromos vezetőképessége.
„Faktor 1-es” és hagyományos induktív érzékelő kapcsolási távolsága:
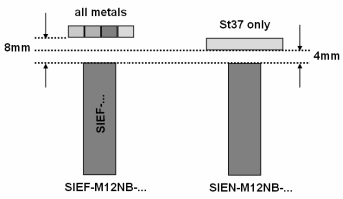
Vannak olyan induktív érzékelők, amelyeknek nagyobb a kapcsolási távolságuk, ráadásul minden fémes vezetőt azonos távolságból érzékelnek. „Faktor 1-es” induktív érzékelőknek hívhatjuk őket.
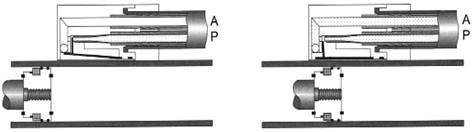
Az induktív közelítéskapcsoló beépítése során az aktív zónától megfelelően nagy távolságban helyezkedhetnek el a fémtárgyak, illetve egy másik induktív érzékelő. Vannak fémbe szorosan, szintbe építhető érzékelők és szintbe nem építhető kivitelűek.
Előbbiek kapcsolási távolsága kisebb, mivel a konstrukció biztosítja, hogy a mágneses erővonalak csak előre, a felületre merőlegesen lépjenek ki a beépített árnyékolás miatt.
Szintbe építhető, illetve szintbe nem építhető induktív érzékelő beépítése:
12. ábra:
Az induktív érzékelők előnyei:
- Szennyeződésekre kevésbé érzékenyek.
- A tárgy színére közömbösek.
- Nincs holtsáv (teljes közelségből is érzékelnek).
- Nem tartalmaznak mozgó alkatrészt.
Hátrányai:
- Kicsi hatótávolság.
- A mágneses tér zavart okozhat.
Az induktív érzékelőket gyakran alkalmazzák fémpaletták érzékelésére, pneumatikus-hidraulikus munkahengerek dugattyúrúdjának érzékelésére, forgásérzékelésre, forgásirány érzékelésre stb.
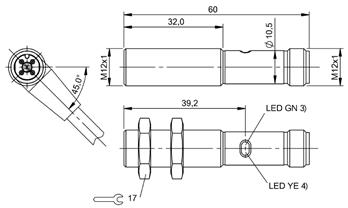
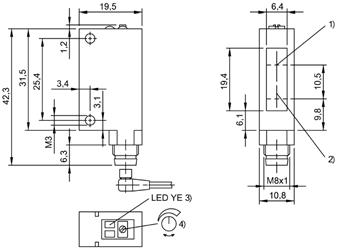
Ipari induktív szenzortípusok
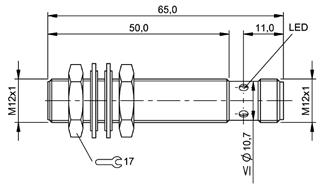
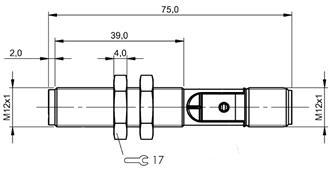
BALLUF BES0068, BES02K3 induktív szenzorok méretei és megjelenése:

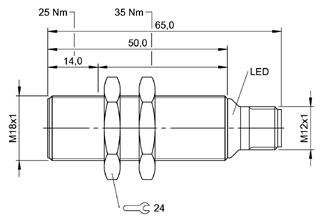
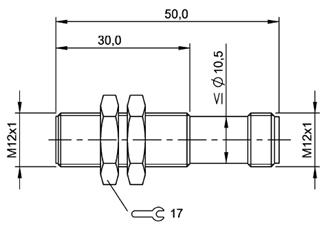
BALLUF BES008M induktív szenzor méretei és megjelenése:

Az érzékelők közötti lényeges különbség a mérési tartományuk, ami a BES0068 esetén 4 mm, a BES02K3 esetén 8 mm, míg a BES008M esetén egy tetszőlegesen programozható érték. Az érzékelők adatlapja a mellékletben megtalálható.
Alkalmazási példák
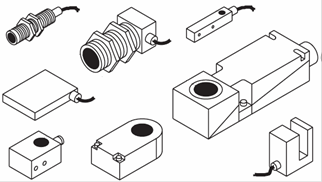
Különböző formájú induktív érzékelők, az érzékelendő munkadarabokhoz igazodó geometriával:
Induktív érzékelők alkalmazási területei, fém fedél érzékelése élelmiszeripari töltőberendezésnél, induktív forgásirány érzékelés:
Mágneses REED érzékelő
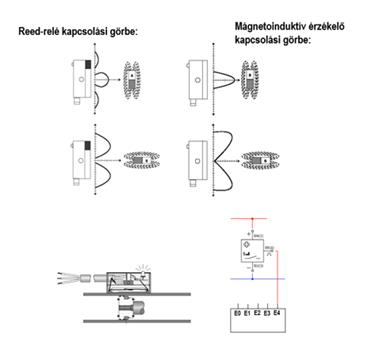
Állandó, vagy elektromágneses tér jelenlétére kapcsolnak. Két, általában ferromágneses anyagú érintkezővel rendelkeznek, melyek néhány tizedmiliméterre helyezkednek el egymástól, alaphelyzetben nyitottak. Mágneses térben az érintkezők deformálódnak, zárják a kapcsolót, a tér megszűnésével a kapcsolat is megszűnik. Az érintkezőket általában egy mindkét végén zárt semleges gázzal töltött hengerbe helyezik, védve ezzel a párával, valamint a korrózióval szemben. Leggyakoribb alkalmazási területük a munkahengerek véghelyzetének érzékelése, ennek érdekében a munkahengerek dugattyúját mágnesgyűrűkkel szerelik.
Magnetoinduktív és REED kapcsoló:
Kapacitív közelítéskapcsolók
Ezen érzékelők aktív eleme egy kondenzátor, amely egy korong alakú elektródából, valamint az aktív felületet határoló, egyik oldalról nyitott tokozásból áll, amely egy elhanyagolható rezgőköri kapacitású RC oszcillátorhoz csatlakozik. Az érzékelő a hatósugarába kerülő tárgyak hatására megváltozik a szenzor kapacitása. Ennek hatására kimenőjelet kapunk tőle.
A kondenzátor egy RC-oszcillátor része, amely úgy van méretezve, hogy akkor rezeg be, ha ez a kapacitásváltozás bekövetkezik. Míg az induktív érzékelőkre az amplitúdómoduláció jellemző, itt a frekvencia változik.
Jelentős különbség az induktív érzékelőkkel szemben, hogy a kapacitív közelítő kapcsolók nem csak a magasan vezetőképes anyagokra reagálnak (fémek), hanem ezen kívül még minden magas szigetelési állandóval bíró szigetelőanyagra is jeleznek (műanyagok, üveg, kerámia, folyadékok és fa).
Kapacitív érzékelő és általános jelképe:

Akár fém, akár elektromosan szigetelő anyag kerül az aktív zónába, az kapacitásváltozást okoz. Folyékony, szemcsés és porított anyagok kimutatására is alkalmas.
A kapcsolási távolságot befolyásoló tényezők
- A tárgy (anyag) helyzete, illetve távolsága az érzékelőtől.
- Az érzékelendő anyag dielektromos állandója.
- A tárgy méretei.
A kapacitív érzékelő műszaki jellemzői:
működtető feszültség |
10 ... 30 V |
maximális áramerősség |
500 mA |
kapcsolási távolság |
5 ... 20 mm |
kapcsolási frekvencia |
max. 300 Hz |
A legtöbb kapacitív érzékelőn található egy potenciométer, amelynek ha egy elektromosan nem vezető anyagú objektum kerül az aktív zónába, a kapacitás a dielektromos állandóval egyenes, a távolsággal fordított arányban változik.
A legnagyobb kapcsolási távolságot vízfelület, illetve földelt, elektromosan vezető anyag esetén kapjuk. Minél kisebb egy nem vezető anyag dielektromos állandója, annál kisebb a kapcsolási távolság segítségével állítani lehet a szenzor érzékenységét. Ez lehetővé teszi bizonyos anyagok detektálásának elfojtását.
Így pl. lehetővé válik a folyadékszint változásának érzékelése vizes oldatok esetén egy műanyag tartály falán keresztül.
A kapacitív érzékelők igen érzékenyek a szennyeződésekre, vízre. Nedves környezetben zavart okozhat a lecsapódó pára. Vékony (nem fém) falon keresztül is érzékel (s < 4 mm), ha az anyag legalább 4-szeres dielektromos állandójú, mint a fal anyaga.
Fémek érzékelésére általában az induktív érzékelőket használják kedvezőbb áruk és a szennyezésekkel szembeni érzéketlenségük miatt. Nem fémek esetén gyakoribb az optikai érzékelők használata.
Ipari kapacitív szenzortípusok
BALLUF BCS00PJ kapacitív szenzor méretei és megjelenése:

BALLUF BMF0022 kapacitív szenzor méretei és megjelenése:

A kapacitív közelítéskapcsolók is készülnek szintbe építhető és szintbe nem építhető változatban.
Alkalmazási példák
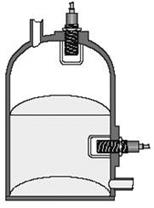
Folyadékszint érzékelés:
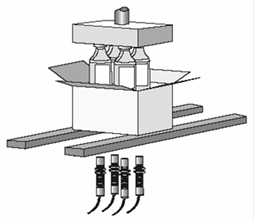
Doboz tartalmának ellenőrzése:
Optikai érzékelők
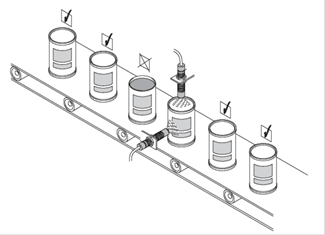
A kialakított rendszerben a tégelyek és a korongok érzékelésére, illetve a színfelismerésre is optikai szenzorok kerültek felhasználásra.
Ezen szenzorok pulzáló fényt sugároznak az emberi szem által nem látható tartományban, a kibocsájtott kötegelt fénycsóva visszasugárzódik az érzékelendő test felületéről. Szinte minden anyagot képesek érzékelni, hiszen megszólalásuk feltétele egy megfelelő pozícióban megjelenő felület.
Az optikai közelítő kapcsolók optikai és elektronikus eszközöket használnak az objektum felismerésére. Ehhez általában vörös vagy infravörös fényt használnak fel. Különösen alkalmas források a vörös és infravörös fényhez a félvezető fénydiódák (LED-ek). Kicsik és erősek, hosszú élettartamúak és könnyen modulálhatóak.
Vevő elemekként fotodiódákat vagy foto tranzisztorokat alkalmaznak. A vörös fény előnye, hogy a felhasznált közelítő kapcsolók beállításánál az optikai tengelyek szabad szemmel felismerhetőek.
Továbbá a polimer fényvezetők csillapítása ebben a hullámhossz tartományban viszonylag kicsi. Infravörös fényt ott célszerű alkalmazni, ahol nagyobb fényerőre van szükség, nagyobb távolság áthidalása a cél.
Infravörös fény esetén a környezetből származó zavaró fények hatása csekélyebb.
A környezetből származó fények zavaró hatásának kiküszöbölése, csökkentése érdekében az optikai jelet modulálják. A vevő (egy utas fénykapu kivételével) az adó ütemével össze van hangolva. Infra érzékelők esetében további javulást érnek el fényszűrők alkalmazásával.
Vannak olyan optikai érzékelők, amelyek lézerfénnyel működnek. Az optikai érzékelőket távolságmérésre, színfelismerésre is használhatjuk.
Háromféle optikai közelítő kapcsolót különböztetünk meg:
- Egy utas optikai érzékelő (infra sorompó)
- Tükörreflexiós optikai érzékelő
- Tárgyreflexiós optikai érzékelőt
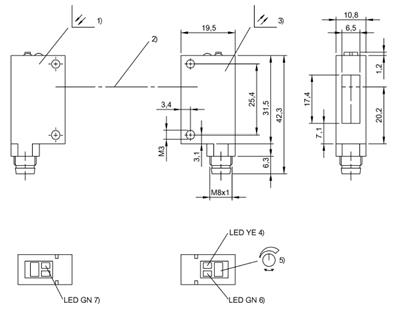
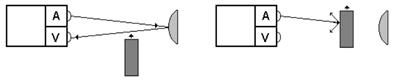
Az optikai érzékelő és általános jelképe a következő ábrán látható:


Az egy utas fénysorompót két részre bonthatjuk, egy adó, és egy vevőegységre, klasszikus fénysorompók esetén ezek egymással szemben helyezkednek el, a kibocsájtott jel alaphelyzetben a vevőegységen detektálódik. Amint test kerül a két egység közé, elállja a fény útját, és a vevőegység nem érzékel jelet, ekkor fog a szenzor kapcsolni. Ebben az elrendezésben az előző szenzorokkal szemben a vezérlés a jel hiányára fog reagálni.
Egy utas fénysorompó elrendezés:

Szintén népszerű elrendezési lehetőség a reflexiós fényérzékelés, itt az adó, és a vevőegység egymás alatt helyezkedik el, velük szemben pedig egy prizma veri vissza az adó jelét a vevőre. Amint test kerül az elrendezésbe a testről visszaverődő fénysugarak a közelségből adódóan már nem a vevőn detektálódnak, hanem kitérnek.
Tükörreflexiós fénykapu:
Lehetőség van arra is, hogy az előző esetet alkalmazzuk visszaverő test nélkül, ekkor az érzékelő alaphelyzetben nem ad majd jelet, csak akkor, ha megfelelő távolságra a fénysugár útjába kerül egy test, melyről visszaverődik a vevőegységbe.
Tárgyreflexiós fénykapu:

Sötétre kapcsoló
A sötétre kapcsoló funkció azt jelenti, hogy akkor ad kimenőjelet, ha nem jut fény a vevőbe. Ez nyitó funkciónak felel meg (NC – normally closed). Tárgyreflexiósnál ez azt jelenti, hogy az érzékelő előtt nincs objektum. Tükörreflexiós és egy utas érzékelőnél pedig megszakítja az érzékelendő tárgy a fénysugarat.
Világosra kapcsoló
A világosra kapcsoló funkció azt jelenti, hogy akkor ad kimenőjelet, ha fény jut a vevőbe. Ez a záró funkciónak felel meg (NO – normally open). Tárgyreflexiósnál ez azt jelenti, hogy az érzékelő előtt van objektum, tükörreflexiós és egy utas érzékelőnél pedig nem szakítja meg az érzékelendő tárgy a fénysugarat.
Működési tartalék
A működési tartalék a szenzorra érkező fénymennyiség és a kimenőjel megváltoztatásához minimálisan szükséges fénymennyiség hányadosa.
A készülékek egy részében van egy második LED (zöld), amelyik világít, ha a rendelkezésre álló hatótávolság 80%-ban ki van használva.
A készülékek másik részében a sárga LED villog, vagy világít egy kiegészítő vörös LED, ha nincs elegendő működési tartalék. Egyúttal tehát jelzi, hogy nem üzembiztos az állapot.
Hatótávolság
A megadott hatótávolság a maximálisan kihasználható távolság az adó és a vevő között (egyutas fénysorompó). Ekkor a potenciométer MAX állásban kell, hogy legyen és a tükörreflexiós érzékelőnél a megadott reflektort kell alkalmazni. Ha az adatlapban nincs másként megadva, a tárgyreflexiós fényérzékelők hatótávolságát a Kodak szürke kártyával (90% szürke) mint referenciával számítják.
Sorba rendezés
Az optoelektronikus érzékelőknek nem szabad egymást befolyásolni. Emiatt a készülékek között egy minimális távolságot kell hagyni. Ez alapvetően a beállított érzékenységtől függ. A fényvezetős készülékeknél a fényvezető típusa is erősen befolyásolja a szükséges távolságot.
Alkalmazási példák
Tárgyreflexiós optikai érzékelő alkalmazási példa
Tárgyreflexiós optikai érzékelő:
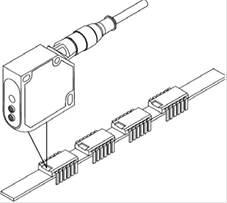
Az adót és a vevőt egymás mellé helyezik el, egy készülékbe építik be. Amennyiben a fénynyaláb találkozik egy fényvisszaverő tárggyal, úgy az visszaverődik a vevőhöz, és az érzékelő kimenete kapcsol.
A fénykapcsoló alapműködéséből kifolyólag csak akkor használható, ha a felismerendő munkadarab, ill. géprész magas fényvisszaverő képességgel rendelkezik (pl. fémes felület, világos festés).
A tárgyreflexiós optikai érzékelőt a fényes háttér megzavarhatja. Ha más módon nem tudjuk ezt kiküszöbölni, akkor háttérelnyomásos készüléket kell alkalmazni.
A tárgyreflexiós optikai érzékelő előnyeihez tartozik, hogy csak az érzékelendő tárgy egyik oldalához kell felszerelni, nincs szükség fényvisszaverőre, egyszerűen irányba lehet állítani. A széles látóterű változatot kivéve holt sávval rendelkezik, nem látja az érzékelendő tárgyat, ha túl közel van az érzékelőhöz.
A rögzített fókuszú változatot apró tárgyak érzékelésére használjuk. Az érzékelendő tárgynak pontos helyen kell elhelyezkednie.
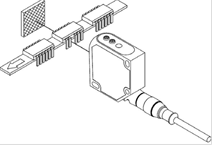
Tükörreflexiós optikai érzékelő alkalmazási példa
Az adót és a vevőt egymás mellé helyezik el, egy készülékbe építik be. A tükröt (prizmát) úgy szerelik, hogy az adóból kibocsátott fénynyalábot teljes egészében a vevőre reflektálja vissza. A fénynyaláb megszakításakor a kimenet kapcsol.
Tükörreflexiós optikai érzékelő:
Fényes, tükröző tárgyak érzékeléséhez polár szűrős változatot használunk. A polarizációs szűrő megfelelő beépítésével az érzékelő csak a speciális reflektorok által visszavert fényre működik.
A tükörreflexiós optikai érzékelő beépítésekor először a készüléket kell a kívánt helyre vinni és felszerelni. Majd a reflektort kell vele szemben elhelyezni és úgy kell takarni, hogy csak a közepe (a felület 25%-a) maradjon szabadon.
Az érzékenységet úgy kell beállítani, hogy biztonságosan kapcsoljon. Ezután el kell távolítani a reflektor borítását.
Egy utas fénysorompó alkalmazási példa
Egy utas optikai érzékelő:
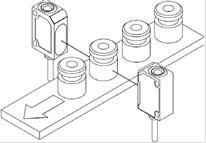
Az egy utas fénysorompók egymástól elválasztott adó-, és vevőegységekből állnak. Az elemek úgy vannak szerelve, hogy az adó közvetlenül a vevőre világít. A fénynyaláb megszakításával a kimenet kapcsol.
Az egy utas fénysorompó adója teszt bemenettel is rendelkezhet. Ezen a bemeneten keresztül lehet az adó fényét be- illetve kikapcsolni. A teszt bemenet periodikus működtetésével és a vevő reagálásának megfelelő kiértékelésével hatékonyan lehet ellenőrizni a fénysorompót.
Az egy utas optikai érzékelő rendelkezik a legnagyobb érzékelési távolsággal, a legnagyobb működési tartalékkal. Így a szennyeződésekre a legkevésbé érzékeny. Beépítése viszont költségesebb, mivel két készüléket kell beépíteni, ezért kétszeres huzalozást igényel.
Átlátszó tárgyakhoz nem használható, viszont a tükröződés nem befolyásolja, fényes tárgyakhoz is megbízhatóan alkalmazható. Vékony tárgyakon, pl. papíron közelről átlát.
Ipari optikai szenzortípusok
BALLUF BOS01TN optoszenzor mérete és megjelenése:

BALLUF BOS012A, BOS012E szenzorok mérete és megjelenése:

BALLUF BOS0126 adó-vevő pár méretei és megjelenése: