
ÉLELMISZERIPARI PICK AND PLACE MECHATRONIKAI OKTATÓ RENDSZER
Hajtástechnikai elemek
Az elektropneumatikus berendezések építőelemei az utóbbi időben sokat fejlődtek. Számos új termék jelent meg a piacon. Ezek a fejlesztések a jövőben is tovább fognak erősödni.
A fejlesztés legfontosabb célkitűzései:
- az elektropneumatikus berendezés összköltségének csökkentése,
- a teljesítményadatok javítása,
- új felhasználási területek megnyitása.
Költségcsökkentés
Az elektropneumatikus berendezés összköltségét sok tényező befolyásolja. Ennek megfelelően a költségcsökkentési lehetőségek is sokoldalúak. A modern elektropneumatikus berendezések költségcsökkentése elsősorban a tervezési-, szerelési-, üzembe helyezési és karbantartási költségek csökkentésében rejlik.
Néhány példa a költségcsökkentés módozataira:
- A készülékszám csökkentése. Több funkció integrálása egy építőelembe.
- Az energiaköltség csökkentése. Csökkentett sűrített levegő felhasználás.
- A huzalozás, csövezés csökkentése.
- Kisebb kapcsolószekrények használata, a kapcsolószekrények elhagyása.
- A karbantartási költségek csökkentése.
- Egyszerűbb szerelés, bontás.
- Meghosszabbított élettartam, magasabb megbízhatóság.
- Egyszerűsített programozás, dokumentálás, elemkiválasztás.
A teljesítményadatok javítása:
- Az ütemidők lerövidítése a sebességek növelésével.
- A súly és a beépítési tér csökkentése.
- Kiegészítő funkciók integrálása, mint pl. vezetékek, útmérő rendszerek.
A pneumatika új felhasználási területeinek feltárása
Azokat az alkalmazásokat, melyeknél sebességeket, pozícionálásokat és erőket folyamatosan villamos vezérlés irányít és felügyel, többnyire villamos és hidraulikus meghajtásokkal valósították meg.
Az olcsó arányos szelepek és nyomásérzékelők kifejlesztésével ma megengedhető, hogy számos felhasználásnál pneumatikus hajtással dolgozzunk.
Ezáltal a pneumatika számára új területek nyílnak. Ez a terület ugyan kisebb, mint a hagyományos elektropneumatikus alkalmazásoké, de erős növekedést mutat. Ugyanakkor a villamos hajtások is szerves elemei maradnak az elektropneumatikus berendezéseknek és azok is tovább fejlődnek.
Korszerű pneumatikus hajtások
A szabványhengerek mellett – melyek költségkímélő, sokoldalúan alkalmazható munkavégző elemekként megtartják jelentőségüket – a speciális hengerek is egyre erősödő jelentőséggel bírnak. Ezen meghajtások használatával különböző kiegészítő elemek, mint pl. vezetékek, tartóelemek, gyakran a hengerházra vannak felszerelve. Ebből olyan előnyök származnak, mint kisebb beépítési tér és kisebb mozgatott tömeg.
Az alacsonyabb tervezési-, anyag-, és szerelési ráfordítás egy érezhető költségcsökkenéshez vezet.
Többállású henger
Többállású munkahenger:
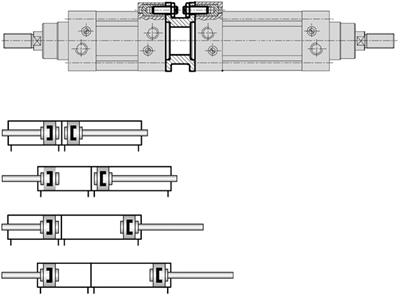
A moduláris felépítés előnyei:
- egyszerű szerelhetőség,
- egymáshoz illesztett meghajtások és megvezetések,
- integrált energia vezeték, pl. befogónak vagy elszívónak.
A többállású hengereket olyan alkalmazásoknál használják, melyeknél több mint két pozíciót kell elérni. Az egyik dugattyúrudat lerögzítik, a másikat a terheléssel kötik össze. Négy különböző pozíciót lehet így elérni, az ütközőkre pontosan lehet pozícionálni.
A manipulációs-, és szerelési műveletekhez gyakran olyan végrehajtó elemek használata szükséges, melyek akár két vagy három tengely mentén tudnak mozgást végezni. Korábban ezen a területen a különleges szerkezetek domináltak. Ma már inkább olyan szerelési modulokat használnak, melyeket a felhasználástól függően lehet variálni.
Fordító-lineáris egység
Fordító-lineáris egység:
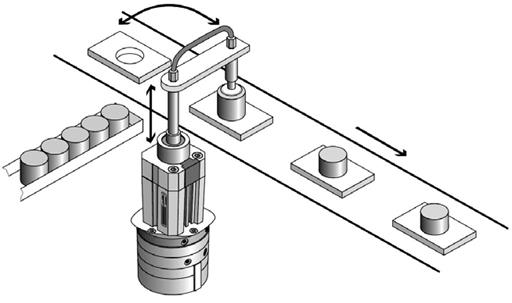
A fordító lineáris egységet munkadarabok áthelyezéséhez lehet használni. Egyetlen hajtóműben egyesíti a lineáris és a fordító mozgásokat. A két mozgást egyenként lehet vezérelni, a két mozgást egymás után vagy egymást átfedve (csavarmozgás) lehet végrehajtatni.
A dugattyúrúd csapágyazása úgy van kialakítva, hogy munkadarabokat tud felemelni a karjával és elforgatni. Szükség esetén a befogóhoz, vagy a szívókoronghoz a dugattyúrúd furatán keresztül odavezethetik az energiát.
Kontrakciós henger
A kontrakciós henger egy kontrahálódó csőből és a hozzá illeszkedő csatlakozó elemekből áll. A belső nyomás hatására a cső keresztmetszete kitágul és ezzel húzóerő, valamint a cső hosszirányában egy kontrakciós mozgás keletkezik.
Kontrakciós henger:

A szokásos hengerekhez képest azonos átmérő mellett jelentősen nagyobb erő, jobb ellenálló képesség az érintkező közegekkel szemben, jelentősen kisebb súly az erőegységre számítva, egyszerű pozícionálhatóság a nyomás irányításával, súrlódás-, szivárgásmentesség, kisebb levegőfogyasztás jellemzi.
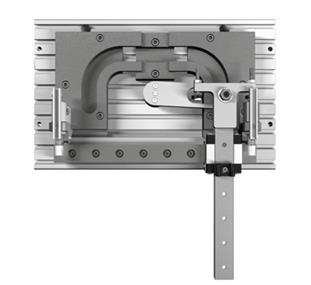
Átrakó egység
Az átrakó egység rotációs modulját egy pneumatikus forgó hajtómű szakaszos szögelfordulással mozgatja. Egy csuklós – kulisszás mechanizmus egy kényszerpálya segítségével transzformálja a mozgást szakaszos lineáris mozgássá. A löketet mechanikusan lehet állítani, a véghelyzetben a mozgási energiát csillapítókkal fékezi le a modul.
A mozgásprofil alkalmassá teszi a hajtóművet a munkadarabok nagy sebességű átrakására, adagolására.
Átrakó hajtómű kényszerpályával:
Útmérős hajtómű
Útmérővel integrált pneumatikus hajtómű:


A manipulációs technikában az integrált hajtóművek egyre gyakrabban kerülnek beépítésre. A pneumatikus pozicionálás e modulokkal egyszerű és kiváló teljesítményű megoldásokra ad lehetőséget.
Az útmérő egység analóg, vagy kvázi analóg jelének segítségével a dugattyú pozíciója pontosan meghatározható. Az egységet összekötve agy arányos pneumatikus szeleppel és a hajtómű két terében a nyomás pontos mérésével a pneumatikus hajtásoktól nem megszokott módon pozíció tartására van lehetőség.
A nyomásváltozás hatására elmozdul a dugattyú, ezt a pozíció elmozdulást egy jelfeldolgozó elektronika segítségével az arányos pneumatikus útszelep korrigálja.
Korszerű elektromos hajtások
Szervo és léptetőmotoros hajtások
AC szervo hajtás:

Az elektropneumatikus berendezéseken a pneumatikus lineáris hajtások mellett elektromos lineáris hajtásokkal is találkozhatunk. Ezek a berendezések nagy ismétlési pontossággal és kiváló pozicionálási képességgel vesznek részt a manipulációs technikában.
Elektromechanikus lineáris hajtások
Elektromechanikus hajtás:

A villanymotor (léptetőmotor, szervomotor) forgó mozgását fogazott szíjas-, illetve golyósorsós egységgel alakítja át egyenes vonalú mozgássá.
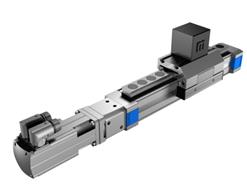
Elektromos lineáris egység
Az elektromos hajtómű nagy dinamikát és pontosságot igénylő manipulációs és szerelési feladatokra alkalmas. A holtjáték nélküli golyóscsapágyazás és a nagypontosságú lineáris hajtómotor a precíziós gépek tervezését nagyon megkönnyíti.
A teljes handling tengely tartalmaz egy lineáris motort, elmozdulás érzékelőt, vezetéket és beépített elektronikus tápegységgel rendelkező külső pozícionáló vezérlőt. Szabadon állíthatók a pozícionálási, gyorsulási, sebességi és erő paraméterek, különböző pozícionálási profilok tárolására van lehetőség, ami kényelmet jelent kis alkatrészek gyártásközi mozgatásában és a legkülönfélébb munkadarabok manipulálásánál – mindez akár ± 0.003 mm ismétlési pontossággal.
A pozícionáló vezérlő a hajtóműhez egészen közel, decentralizáltan helyezhető el (IP54 védettség).
Lineáris motor:

Az elektromos hajtóművek kiegészítik a pneumatikus teljesítmények tartományát a szerelő rendszerek által igényelt rugalmassággal és mozgatási pontossággal. A döntés, hogy csak az egyikféle hajtóművet használják, vagy kombinálják a pneumatikus és az elektromos hajtóműveket egy adott feladathoz, kizárólag az alkalmazástól függ.
A lényegük az, hogy a felhasználók az egymással harmonizáló pneumatikus és elektromos elemek olyan széles tartományából választhatnak, amelyek a “plug and work” (“csatlakoztasd és működik”) elvet valósítják meg, ezzel is növelve a tervezés, az üzembe helyezés és a termelés hatékonyságát.
Orsós hajtások
Orsós hajtómű:

Precíziós hajtóműként a manipulációs technikában az alkalmazásuk jelentősen elterjedt. A hajtómotor elektromos szervo motor, mely nagy sebesség mellett is kiváló pontossággal és pozíciótartással mozgatja a szánegységet.
Ipari esettanulmány léptetőmotoros hajtással
A különféle gyártógépek tervezésekor alapvető követelmény, hogy az adott alkalmazást megfelelő minőségben, pontosan és a lehető leggyorsabban hajtsa végre az adott gép vagy gépegység. Ehhez ismerni kell az egyes alkotóelemeket és ezek ismeretében lehet csak érdemben megfelelő ár-érték arányú, versenyképes berendezést alkotni.
Az automata gépeknek, gépsoroknak működésük közben sok kritériumnak kell megfelelniük. Ilyenkor mérlegelni kell, milyen eszközöket alkalmazzunk a berendezésben. A mozgó egységek mozgatásáért rendszerint pneumatikus, hidraulikus és elektromos segédenergiával működő berendezések, eszközök a felelősek. Mindegyik változatnak megvan a maga előnye és hátránya. Ezért találhatók a legtöbbször vegyes rendszerű gépek az iparban. Hogy mikor melyiket alkalmazzuk azt az egyes működtetők előnyei határozzák meg.
A legfőbb szempontok: erőszint, pozíciótartás, ismétlési pontosság, sebesség-viszonyok, ár.
A nagy erőtartományt és jó pozíciótartást biztosító hidraulika sok esetben a bonyolultabb kiépítési és karbantartási igénye és a viszonylag alacsony sebesség tartománya miatt szorul háttérbe.
A pneumatikus végrehajtó elemek alacsony bekerülési értékük mellett azzal a hátrányos tulajdonsággal rendelkeznek, hogy löket közben több pozícióban megállítani megfelelő ismétlési pontossággal csak valamilyen külső egységgel (stopper egységek, fékrendszerek) vagy úgynevezett „air-szervo” rendszerekkel lehetséges. Másik nehéz feladat a levegővel működtetett végrehajtók esetében az egyenletes gyorsulás/lassulás, valamint a nem ingadozó sebesség beállítása.
Az elektromos szervo hajtások egy működési tartományon belül, többszöri pontos pozíciót képesek felvenni, a gyorsulás, a sebesség és a lassulás programozása is rugalmasan lehetséges. Mindezzel együtt bizonyos nyomatéktartományok esetén a bekerülésük igen magas.
Léteznek hibrid rendszerek is, mikor az elektromos hajtások erejét pneumatikus vagy hidraulikus segéd-aktuátorokkal növelhetjük meg. Ugyanakkor, ha nincs szükség hatalmas erőkifejtésre, van egy másik lehetőség, hogy egy mozgástartományon belül fix pozíciókkal, beállítható gyorsulással és lassulással, megfelelő és ingadozásmentes sebességgel pozícionálhassunk elérhető áron. Ezt a feltételrendszert elégítik ki a léptetőmotoros szervo hajtások.
Alacsony terheléssel rendelkező elektromos lineáris egységek esetében lehetőség van 24VDC léptetőmotoros szervo hajtások (hibrid szervók) vagy 24V-os aszinkron szervomotorok használatára.
A nyomatéktartomány tekintetében látható, hogy a léptetőmotoros végrehajtó elemek esetén csak alacsony sebességnél érhetünk el nagy nyomatékot, míg a szervomotorok esetében a rendelkezésre álló nyomaték a névleges fordulatszám eléréséig állandónak tekinthető.
Mindezek alapján sokszor azt a következtetést vonhatjuk le, hogy a léptetőmotoros egységek nem elég hatékonyak. Ugyanakkor alacsony teljesítményeknél a léptetőmotor alkalmazása gazdaságosabb.
Léptető- és szervomotor n-M diagramja:

A programozási lehetőségek tekintetében beszélhetünk impulzussorozatos vezérlésről, a hajtásvezérlő memóriájában tárolt mozgásprofilok digitális I/O-kon való meghívásáról, illetve direkt pozicionálásról terepi buszon keresztül.
Impulzussorozatos vezérlés:

Különböző tárolt mozgásprofilok:

Direkt pozicionálás terepi busszal:

Az impulzussorozatos vezérlés esetén a villamos hajtás egyfajta erősítőként üzemel. Az impulzusok frekvenciája határozza meg a sebességet, a pozíciót pedig az impulzusok darabszáma. Mivel a motorokat két irányba is szükséges forgatni, így szükség van két csatornára. A két csatorna működhet impulzus / impulzus, vagy impulzus / irány szerint.
Ha a vezérlő alkalmas rá, akkor egy külső eszköz (PC+szoftver vagy kézi betanító) segítségével a memóriába rögzíteni lehet mozgásprofilokat. Ezeket (általában 24V-os jelszintű) digitális ki- és bemeneteken keresztül meg lehet hívni és ezen keresztül ad visszacsatolást az állapotáról egy felettes szerv felé. Ezek a profilok később módosíthatók az említett eszköz segítségével.
A terepi buszos kommunikáció lehetővé teszi a közvetlen pozícióra küldést és az arról való értesítést, a pozíció visszacsatolást. Ennek a rendszernek fő előnye a rugalmasság. A felettes eszköz tárolja a mozgásprofilokat, így ezek száma gyakorlatilag végtelen. Lehetőség van diagnosztikára. A hibakódok terepi buszon keresztüli kiolvasása pontosabb információt ad a gépkezelőnek, karbantartásnak a probléma megoldásához, jövőbeni esetek kiküszöböléséhez.
Az említett módok vagy azok kombinációja alapján állíthatók be az alábbi ábrákon látható mozgásjellemzők.
A pontossági paraméterek tekintetében fontos tény, hogy mi is maga a villamos hajtás. Gyakran csak a motort azonosítjuk a hajtással, pedig ez egy egységként működő rendszer.
Az elektromos hajtás áll egyrészt a motorból, másrészt egy mechanikai szerkezetből, amely a kívánt mozgást hozza létre a motor forgó mozgásából, valamint ezen részek összehangolására alkalmas vezérlőből. A végelem mozgatását a legtöbb esetben golyós orsós, vagy szíjas hajtás végzi.
Golyós orsós hajtás:

Szíjas hajtás:

Ez több szempontból lehet fontos, pl. a pontosság szempontjából. Így tehát az elektromos hajtások pontosságát három tényező befolyásolhatja.
Az első a „Positioning repeatability” (ismétlési pontosság), ami a teljes rendszer beállási pontossága. Megmutatja, hogy többször ugyanabból az irányból mekkora pontossággal áll be ismételten ugyanabba a pozícióba a hajtás. A második a „Backlash” (holtjáték). Ha van mechanikai áttétel a rendszerben, annak lehet holtjátéka (pl.: csigás áttétel, fogaskerékpár kapcsolat, stb.). A harmadik pedig a „Lost motion” (elvesztett mozdulat).
Ez a meghajtás felőli mechanikai pontatlanságot jelenti. Szíjas erőátvitel esetén a szíj feszességéből adódó út-veszteség, ami a mechanikai kialakítás végén levő kocsi vagy asztal pontosságát befolyásolhatja. Ezek alapján belátható, hogy nem csak a motor függvénye a pontosság.
Valójában mi is a „léptetőmotoros szervo hajtás” elnevezés.
A hagyományos léptetőmotoros hajtás „csak” magából a motorból, egy léptetőmotor vezérlőből és egy meghajtott mechanikából áll. Így viszont a pozícióra állás tényleg „tisztán” vezérlés alapján történik, a motor a kívánt pozíció eléréséig szükséges lépésszámának megadása alapján. Így előfordulhat a léptető motorokra jellemző lépésvesztés.
A szervo megnevezést a motorra szerelt enkóder miatt kaphatta meg, mivel ezáltal megvalósul a visszacsatolás a pontos pozícióról. Így megtörténik a szabályzás, ha szükséges a beavatkozás vagy korrekció is. Ezt sok esetben hívják hibrid szervo motornak is.
Tehát az enkóder fontos szerepet tölt be az elektromos hajtásoknál, mivel ezek segítségével kapunk visszajelzést a helyes pozíció felvételéről, a sebességről és a forgásirányról.
Ezeken a léptetőmotoros elektromos hajtásokon inkrementális, vagy növekményes forgás jeladó (19.ábra) van.
Használatakor minden bekapcsoláskor a rendszerrel fel kell vetetni egy referenciapontot, referencia értéket. A szervo vezérlő ehhez viszonyítva állapítja meg az elmozdulás értékét az impulzusok száma és a forgásirány függvényében.
Inkrementális, vagy növekményes forgás jeladó:

A teljes rendszer abszolúttá tételéhez általában egy külső energiaforrást (akkumulátor) használnak, amely az enkódert és a pozíciószámláló egységet energiával látja el abban az esetben, amikor a tápfeszültség nem áll rendelkezésre. Így a motorvégi enkóder szempontjából lehet akár inkrementális is egy abszolút rendszer.
Minden esetben körültekintően kell kiválasztani a megfelelő hajtást, amely kielégíti az alkalmazásunk igényeit figyelembe véve erőforrásainkat. Ezért érdemes az elektromos hajtások alkalmazásánál figyelembe venni a léptetőmotoros, hibrid szervo hajtásokat.
Az elektromos hajtás rendszer általános felépítése:
